THEORETICAL INFORMATION Observing and analyzing three dimensonal collision events are quite complex. Therefore, one- dimensional collision events will be examined in this experiment. Collision events can be studied simply when the sum of external forces is zero", that is the case when there is no net force acting on the system other than the action-reaction forces between the colliding objects. As a result, "the total linear momentum of the system is conservative". When external forces do no work, the total kinetic energy of the system depends only on the work of internal forces. Although the sum of the internal forces in a collision event is zero due to the action-reaction principle, the total work done may be different from zero. If the total work done by internal forces is zero, the total kinetic energy of the system does not change during the collision. This type of collisions are called "elastic collisions". If the total work done by internal forces is not zero, the total kinetic energy of the system changes (may increase or decrease) during the collision. This type of collisions are called "inelastic collisions". A decrease in the total kinetic energy of the system indicates that there are retarding forces in the interaction. On the other hand an increase in the kinetic energy indicates that some internal potentials (chemical, etc.) transform into kinetic energy as a result of the interaction The numerical values of the momentum and kinetic energy of the system and its parts) may vary depending on the observation frame in which the calculations are done. However, the characteristics of being elastic or inelastic and the numerical value of the change in the kinetic energy in inelastic collisions will be the same in every observation frame. There are two norms to understand whether the collision is elastic or inelastic. The velocities before the collision are vi, V2 and the velocities after the collision are ui, u2. Then, the two norms are; Ratio of the final kinetic energy to the initial kinetic energy: Kr/K;=e, the coefficient of elasticity • Ratio of the relative velocities after and before the collision: Jūs-ul/16-7,l=r, the coefficient of bouncing Values of 1 fore and r indicate that the collision is elastic, values other than 1 indicate that the collision is inelastic Elastic collision of two objects in three dimensions is mathematically expressed with the equations of momentum conservation (vectorial) and energy conservation (scalar): momentum conservation: energy conservation: P = mū + m2īz = mü+ mzūz = P, K = mv + mvi= mu} + mzuż = K;
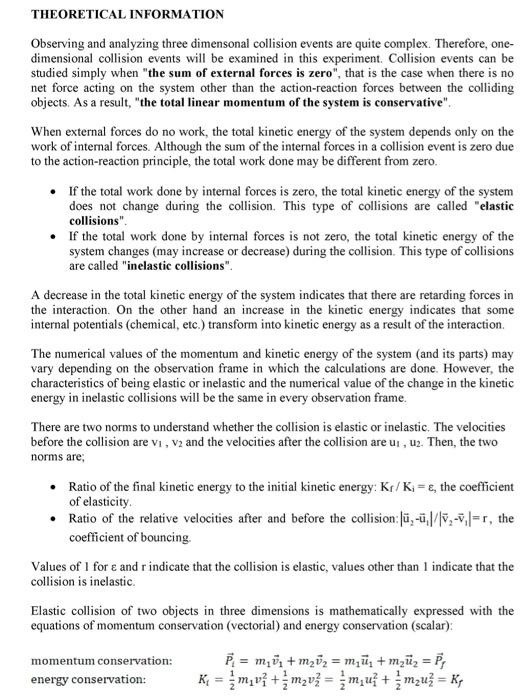
These equations reduce to: mv + m2v2 = m+mzu2 and Yumi vp?+ mavz? =Vmu+muz? in one dimension. It should be noted that, here, the velocities are algebraic numbers expressed with respect to the coordinate system that is chosen By solving the above two equations together, the following equations are obtained in one dimension in the case of elastic collision us=[( mm/(m+m:)]vi + [(2m2)/(m+m)]v2 uz = [(2m)(m+m:)) + f(m3-mi (m+m2)]v THE EXPERIMENT Figure 6.1 The setup of the experiment consists of a lower rail, two cars (A1, A2) and two optical sensors (01, 02), as shown simply in Figure 6.1. There are spring-loaded pusher units behind the cars that push and give an initial velocity to the car. A pusher unit can provide three different initial velocities for its three different positions (low, moderate, high) Optical sensors O1 and 02, will be used to measure the velocity of the cars. There are magnets in front of the cars and they are placed in a way to repel each other. The purpose of using magnets is to prevent additional losses in a mechanical collision Since the cars are moving on a rail with friction, you first need to find the error that arises from friction. Therefore, a preliminary preparation will be done. Make sure that the rail is perfectly horizontal • Place the O1, O2 sensors in the middle of the rail such that they are 20 cm apart Adjust the pusher unit for low initial velocity and determine the change in the velocity for 20 cm displacement of the 1" car (AT). Fill in Table 6.1. Table 6.1 X - 30 cm X-50 cm Vi(cm/s) Valcm/s) 36.6 36.3 36.4 36.2 35.7 35.5 • Repeat the above procedure three times to find the average loss of velocity per meter Av-1/0.2. This value is the absolute error of the velocity measurement for this system Sv in units of (m/s).
34.7 31.6 32.2 37.1 0 0 0 0 A. Elastic Collision of Objects with Equal Masses V10, v2=0, mama= 250 gr 1) Leave the 20 car (A2) at rest in the middle of the rail (between 01 and 02). 2) Give an initial velocity to the 1" car by adjusting its pusher unit for moderate velocity 3) Calculate the initial total momentum P, and the final total momentum Prof the system by measuring the velocities vi, us and uz Note that velocities are algebraic numbers when calculating momenta. Take the direction of vi as the positive direction. 4) Repeat the experiment four time and find the average values by filling in Table 6.2. Table 6.2 Vi(m/s) vx(m/s) u (m/s) uz(m/s) Pikg.m/s) Pakgm/s) AP(kg m's) P. (kg.ms) E 0 33.9 0 30.8 0 30.9 0 36.2 Average Values 5) Using the average values, find APP = ( P:|-|PY|PI|P|y2] the relative change in momentum. Ideally, u: - O and AP -0. However there is friction, therefore we may get slightly different results, Error Calculation: The most important error in this experiment is caused by the change in the velocity due to friction. Since all velocity changes are obtained for approximately same amount of displacement, the numerical value of Sv (m/s) initially found per im can be used as the absolute error for all of the velocity measurements, that is Av-1/0,2 – 3v1 = 8v2 = @uBuz Now calculate the absolute error for the change in momentum: 6AP = |dAP/dvlov | C|P:I-IP: lydv Ev -|(mus+mus-mvi) | dv lov || Sumu+1-movi = m(ou:+buy+ðvi) – 3m v relative error for the change in momentum P/AP - 3 v/ [(u: + uz–v;)] B. Elastic Collision of Objects with Different Masses 1) Add the additional mass of 250 gr to the Al car, repeat what you have done in part (A) and fill in Table 6.3. ( mm) v1+0,2-0, mı - 500 gr, mz - 250 gr Table 6.3 vi(m/s) vz(m/s) ui(m/s) uz(in's) Pikgm/s) Pakgm/s) AP(kgm/s) P. (kgm/s) E 23.0 27.4 25.2 25.4 0 0 0 0 28.1 04 294 06 278 0.4 29.8 0.4 Average Values
2) Add the additional mass of 250 gr to the A2 car, repeat what you have done in part (A) and fill in Table 6.4. (m/
B. Elastic Collision of Objects with Different Masses Table 6.3 Vi(m/s) Vz(m/s) ui(m/s) uz(m/s) P (kg.m/s) P (kg.m/s) AP(kg.m/s) P. (kg.m/s) 0 E 0 0 0 Average Values E Table 6.4 vi(m/s) vz(m/s) u(m/s) u2(m/s) P (kg.m/s) Pckg.m/s) AP(kg.m/s) Pa (kg.m/s) 0 0 0 0 Average Values C. Inelastic Collisions Table 6.5 Vi(m/s) v2(m/s) u(m/s) uz(m/s) Pi(kgm/s) P (kg.m/s) AP(kgm/s) P. (kgm/s) 0 0 0 Average Values Table 6.6 Vi(m/s) va(m/s) (m/s) u2(m/s) P (kg.m/s) Pckg.m/s) AP(kg.m/s) P: (kgm/s) E Average Values Result of the Experiment:
没有找到相关结果