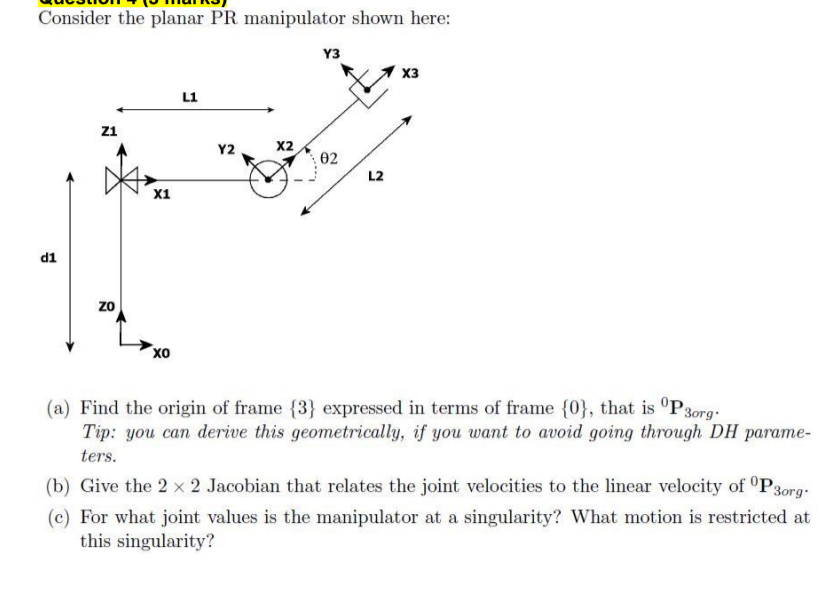
Consider the planar PR manipulator shown here: Y3 X3 L1 21 Y2 X2 02 - L2 X1 di zo Хо (a) Find the origin of frame {3} expressed in terms of frame {0}, that is 'P3org. Tip: you can derive this geometrically, if you want to avoid going through DH parame- ters. (b) Give the 2 x 2 Jacobian that relates the joint velocities to the linear velocity of °P3org- (c) For what joint values is the manipulator at a singularity? What motion is restricted at this singularity?
没有找到相关结果